
 отправка...
отправка...Компоненты для обеспечения механического позиционирования антенных систем
Введение
Несмотря на то, что радиолокационные системы с применением фазированных решеток позволяют производить электронное сканирование пространства, диапазон перемещения луча остается ограниченным, как следствие конструктивного исполнения. Кроме того, на граничных углах существенно ухудшаются радиолокационные характеристики. Поэтому в соответствии с необходимым сектором обзора разработчики таких систем зачастую вынуждены применять механические системы ориентации плоскости антенны в пространстве.
В зависимости от задачи к системам позиционирования предъявляются различные требования по техническим характеристикам, но можно выделить два базовых принципа, значимых практически для любой подобной системы, — точное определение относительного положения (угла относительно определенной оси) антенны в каждый момент времени и диапазон возможного изменения этого угла.
Предлагаем рассмотреть два типа устройств, предназначенных для решения подобных задач, — датчики положения (энкодеры) и вращающиеся сочленения, позволяющие в совокупности обеспечить вращение антенны на углы до 360° включительно (непрерывный полный оборот) и точное определение текущего значения угла поворота.
Датчики положения (энкодеры)
Одним из лидеров по проектированию и изготовлению подобной продукции является компания Netzer Precision Motion Sensors Ltd (Израиль). Эта компания, основанная в 1998 году, занимается разработкой, производством и поставками эффективных электрических датчиков абсолютных угловых и линейных перемещений (рис. 1) на основе запатентованного решения Electric Encoder [1–5].

Рис. 1. Продукция компании Netzer
Запатентованное решение Electric Encoder представляет собой бесконтактную технологию измерения углового и линейного положения, основанную на периодическом изменении электрического поля при изменении положения ротора, что позволяет получить ряд преимуществ по сравнению с оптическими и магнитными датчиками. Простая и надежная конструкция, высокая точность, малые инерционные характеристики, малая высота профиля (менее 10 мм), высокая степень защиты от конденсата и загрязнений, нечувствительность к электромагнитным помехам, низкое энергопотребление, высокая степень адаптируемости датчика к требованиям заказчика — вот лишь часть преимуществ, сделавших датчики Netzer популярными по всему миру. Рассчитанные на тяжелые условия эксплуатации, датчики успешно применяются в таких областях, как:
- системы вооружения с дистанционным управлением;
- авионика, аэрокосмическая робототехника и приводные механизмы;
- панорамные установки видеонаблюдения и прицеливания;
- промышленное оборудование и медицинские приборы;
- медицинские изделия, геофизические приборы;
- возобновляемые источники электроэнергии.
Еще одним важным преимуществом вращающихся датчиков Netzer является возможность индивидуальной калибровки в составе изделия для компенсации радиальных биений и неперпендикулярности с записью калибровочных данных в энергонезависимую память датчика.
Вращающиеся датчики фирмы Netzer — это датчики угла (ДУ) высокой точности, по принципу действия относящиеся к емкостному типу, имеющие в своем составе грубый и точный каналы измерения угла. Роторная часть ДУ представляет собой диэлектрический диск зубчатой формы (рис. 2а) с двумя наборами зубьев (полюсов) для грубого и точного каналов. Статорная часть содержит две платы с неподвижными электродами ДУ. При этом на нижней плате размещено два набора радиально расположенных электродов для грубого и точного каналов, а на верхней — два кольцевых электрода. Количество радиальных электродов в четыре раза больше количества зубьев для каждого из каналов. Причем каждый из первых четырех электродов соединяется с каждым последующим четвертым электродом, образуя в результате четыре набора электродов для каждого из двух каналов. При повороте ротора изменяется комбинация открытых и перекрытых диэлектрическими зубьями неподвижных электродов и степень их перекрытия, что приводит к изменению электрического поля между электродами верхней и нижней плат. Изменения электрического поля измеряются электроникой, расположенной на верхней плате, которая формирует четыре аналоговых выходных сигнала постоянного тока (по два для каждого из каналов), пропорциональных синусу и косинусу угла поворота. По комбинации полученных значений сигналов вычисляется абсолютный угол поворота ротора.
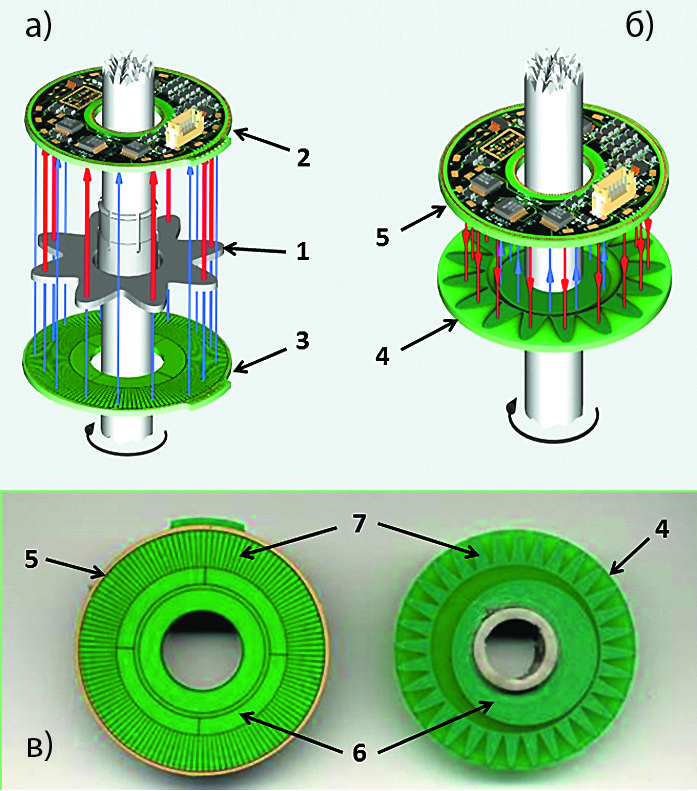
Рис. 2. Варианты конструкций датчиков угла фирмы Netzer:
а) с диэлектрическим ротором;
б, в) с ротором, совмещенным с нижней платой:
1 — диэлектрический ротор;
2 — верхняя пластина с электроникой;
3 — нижняя пластина;
4 — ротор, совмещенный с нижней пластиной;
5 — верхняя пластина с электроникой;
6, 7 — электроды грубого и точного каналов соответственно
Второй вариант конструктивного исполнения представлен на рис. 2б,в. Здесь роль статорной части выполняет верхняя пластина, а роль роторной части — нижняя пластина с фигурными электродами в виде зубцов. Датчик имеет аналогичный принцип действия за исключением того, что изменения электрического поля при повороте ротора происходят за счет изменения площади перекрытия электродов на верхней и нижней платах.
В зависимости от угла поворота ротора выходные аналоговые сигналы меняются по синусоидальному закону. В один оборот ротора укладывается некоторое количество электрических циклов грубого M и точного N каналов, равное количеству зубьев (полюсов) ротора в точном и грубом каналах соответственно. Например, на рис. 2 изображен случай, когда M = 1, а N = 8. Очевидно, что одной паре значений выходных сигналов точного канала могут соответствовать восемь значений углов, поэтому для исключения неопределенности используется пара сигналов с грубого канала. Обычно количество электрических циклов грубого канала M варьируется от 1 до 7, а точного канала N — от 16 до 128. В случае если M больше 1, снова появляется неопределенность, которая устраняется путем выбора M и N такими, чтобы они не имели общего знаменателя. Таким образом, любому углу поворота ротора будет соответствовать уникальная комбинация сигналов грубого и точного каналов (рис. 3).

Рис. 3. Выходные сигналы грубого и точного каналов в зависимости от угла поворота ротора датчика угла
На практике грубый канал применяется только при включении ДУ для определения начального положения роторной части, далее угловое положение определяется по приращению сигналов в точном канале. При этом пользователю доступны на выбор аналоговый выход sin/cos, требующий дополнительной постобработки для определения абсолютного угла, и цифровые выходы SSI и AqB+I, предоставляющие информацию об абсолютном угле и о приращении угла соответственно.
Разрешающая способность ДУ зависит от количества электрических циклов точного канала N (а следовательно, и от количества зубьев ротора) и от разрядности L АЦП, на которые поступают аналоговые выходные сигналы датчика. С учетом того, что при изменении угла поворота за один электрический цикл синусоидальный выходной сигнал проходит диапазон АЦП 2 раза, разрешающая способность в пределах одного электрического цикла будет равна L+log2(2) бит, а разрешающая способность на всем диапазоне углов от 0° до 360° будет равна L+log2(2×N) бит. Например, для датчика DS‑70 с N, равным 64, и при использовании 12‑разрядного АЦП получаем разрешающую способность в 19 бит.
Взглянув на таблицу 1, можно проследить тенденцию повышения разрешающей способности с увеличением наружного диаметра датчиков. Это объясняется тем, что разрешающая способность может быть увеличена повышением либо разрядности АЦП, но она ограничена уровнем шумов самого датчика, либо количества зубьев, что приводит к увеличению наружного диаметра датчика.
|
Пластиковый корпус |
DS-25 |
DS-37 |
DS-58(20) |
DS-70 |
DS-90 |
DS-130 |
DS-247 |
– |
|
Металлический корпус |
DM-25 |
DM-37 |
DM-58(20) |
DM-70 |
DM-90 |
DM-130 |
– |
DL-25 |
|
Количество электрических циклов на 1 оборот ротора |
16 |
16 |
32 |
64 |
64 |
64 |
128 |
16 |
|
Разрешающая способность (с 12-разрядным АЦП), бит |
17 |
17 |
18 |
19 |
19 |
19 |
20 |
17 |
|
Точность |
<±0,015° |
<±0,015° |
<±0,01° |
<±0,01 |
<±0,01° |
<±0,01° |
<0,006° |
<0,04° |
|
Предельная рабочая скорость, об/мин |
3000 |
1500 |
750 |
375 |
750 |
|||
|
Диапазон измерений |
360° — полнооборотный |
|||||||
|
Общий вес (пластиковый корпус), г |
4 |
10 |
36 |
50 |
50 |
65 |
665 |
25 |
|
Внешний диаметр/внутренний диаметр/высота, мм |
25/6/7 |
37/10/8 |
58/20/10 |
70/30/10 |
90/50/10 |
130/90/10 |
247/170/10 |
25/–/20, вал 4 мм |
|
Степень защиты |
IP40 (по заказу — до IP65) |
IP65 |
||||||
|
Диапазон рабочих температур, °С |
–40…+85 |
|||||||
|
Относительная влажность |
<98% без конденсации |
|||||||
|
ЭМС |
IEC 6100-6-2, IEC 6100-6-4 |
|||||||
|
Стойкость к ударам |
IEC 60068-2-27; 100g 11 мс |
|||||||
|
Стойкость к вибрации |
IEC 60068-2-6; 20g в диапазоне 10–2000 Гц |
|||||||
|
Напряжение питания, В |
+4,6…+5,5 |
|||||||
|
Потребляемый ток, мА |
10 (аналоговый), 160 (цифровой) |
180 |
||||||
Продукция фирмы Netzer представлена линейкой датчиков угла в различном исполнении, датчиками линейных перемещений и набором оборудования для отладки. Возможен вариант изготовления датчиков со степенью защиты IP65 с полной защитой от пыли.

Рис. 4. Отладочный набор Netzer
Отладочный набор Netzer (рис. 4) содержит демонстрационный поворотный столик с установленным датчиком угла линейки DS, преобразователь интерфейса и программное обеспечение (рис. 5, где отображена часть функциональных возможностей), включающее набор инструментов для тестирования и калибровки датчика.

Рис. 5. Программное обеспечение отладочного набора Netzer:
а) главное окно;
б) окно калибровки;
в) окно анализа выходных сигналов
Также следует уделить внимание опыту фирмы Netzer в разработке датчиков для различных условий эксплуатации и окружающей среды. Например, датчик угла DL‑25 (рис. 6) имеет степень защиты IP65 по умолчанию. А человекоподобный робот «Робонавт‑2» (R2), предназначенный для эксплуатации как внутри, так и снаружи Международной космической станции, включает 25 датчиков угла Netzer, которые исполнены в радиационно-стойком варианте, предназначенном для работы в открытом космосе.

Рис. 6. Датчик угла DL 25 фирмы Netzer со степенью защиты IP65
Вращающиеся сочленения
Для систем (рис. 7), использующих в своем составе фазированные решетки и предназначенных для непрерывного кругового обзора пространства, вопрос передачи информации с движущейся части на неподвижную становится одной из первоочередных задач.

Рис. 7. Примеры использования вращающихся антенных систем
Именно разработкой таких компонентов начиная с 60‑х годов прошлого века успешно занимается компания Spinner Group (Германия). На данный момент компания имеет возможность предложить потенциальным заказчикам широкий спектр подобных решений:
- коаксиальные переходы;
- волноводные переходы;
- оптические переходы;
- скользящие контакты (передача низкочастотных, цифровых и сигналов питания);
- вращающиеся переходы для передачи охлаждающих жидкостей (эта возможность особенно актуальна для мощных АФАР, в частности корабельного базирования);
- комплексные системы, позволяющие произвольно комбинировать все предыдущие типы переходов.
Каждый вращающийся переход, как правило, является заказным изделием, выполняющим специализированные функции и имеющим специально заданные характеристики. Поэтому ограничимся несколькими примерами уже реализованных этой компанией решений и описанием общих возможностей по разработке новых (табл. 2).
|
|
3 канала ВЧ-сигналов: CH1: 9–10 ГГц; CH2, CH3: 1–1,1 ГГц А также 18 каналов передачи сигналов управления и питания. |
|
|
9 каналов ВЧ-сигналов: CH1: 2,85–3,35 ГГц (1500 кВт/20 кВт) CH2, CH3: 2,85–3,35 ГГц (20 кВт/200 Вт) CH4–CH 7: 2,85–3,35 ГГц (10 кВт/100 Вт) CH8, CH9: 1–1,15 ГГц (10 кВт/70 Вт) А также 51 канал передачи сигналов управления и питания. |
|
|
3 канала ВЧ-сигналов: H1: X-диапазон (1500 кВт/20 кВт) CH2, CH 3: L-диапазон (20 кВт/200 Вт) |



Отдельно хочется остановиться на таком решении, как оптические переходы вращения (рис. 8). Современная тенденция такова, что разработчики стараются выполнить преобразование аналоговых сигналов из эфира в цифровой код уже на вращающейся части, а передачу данной информации в централизованный блок обработки осуществлять по волоконно-оптической линии. Это позволяет получить целый ряд преимуществ перед традиционными коаксиальными либо волноводными линиями передачи:
- Уменьшение габаритных размеров перехода вращения — например, 12‑канальный оптический переход BN 54 95 82 имеет размеры: 118,2 мм в длину и всего 60 мм наружный диаметр в ширину.
- Для применений, где требуется передавать сигнал с антенной системы на относительно большие расстояния (корабельная техника, авиация, оборудование обзора летного поля и т. д.), использование оптоволоконных линий позволяет это осуществлять практически без отрицательных последствий, в то время как применение коаксиальных или волноводных линий приводит к существенным ограничениям из-за потерь в линии передачи. Немаловажный фактор — улучшение электромагнитной совместимости такой линии передачи в плане как эмиссии электромагнитного поля, так и помехоустойчивости.
- Передача сигнала в цифровом виде исключает возможность его искажения в линии и существенно улучшает его помехозависимость.

Рис. 8. Многоканальное вращающееся сочленение для передачи оптических сигналов:
а) внешний вид;
б) конструкция
Инженерами компании Spinner применяется технология реализации передачи оптического потока через элемент вращения путем использования призмы Дове и редуктора (рис. 9).

Рис. 9. Прохождение луча через призму Дове
При вращении призмы Дове изображение поворачивается на угол в два раза больше, что позволяет направлять изображение в любом требуемом направлении. Таким образом, при использовании редуктора скоростей удалось добиться точного позиционирования лучей на ответной части перехода и возможности реализации вплоть до 42 каналов на один вращающийся переход (табл. 3).
|
Параметр |
Значение |
|
Количество каналов |
1–42 |
|
Длина волны, нм |
850, 1310, 1550, одно- либо многомодовые режимы |
|
Типы входных/выходных соединителей |
FC/PC, FC/APC, ST/PC, SC/PC, SC/APC, LC/PC, LC/APC, E-2000/PC, E-2000/APC, FSMA |
|
Возвратные потери на отражение, дБ |
55 |
|
Вносимые потери на прохождение, дБ |
1 |
|
Девиация вносимых потерь при вращении, дБ |
0,5 |
|
Максимальная скорость вращения, об/мин |
2000 |
|
Гарантированный цикл работоспособности, оборотов |
200 млн |
Заключение
В заключение как этой статьи, так и всего цикла хочется отметить факт достаточно большого количества современных решений различной степени сложности и интеграции для реализации систем, базирующихся на принципе сканирования луча в фазированной решетке. Перед инженерами-разработчиками открывается огромное поле деятельности для создания комплексов с повышенными техническими и эксплуатационными характеристиками.
- radiant.su
- US 6492911 B1. Capacitive displacement encoder / Netzer Y.; Assignee: Netzer Motion Sensors Ltd.; Date of patent: Dec. 10, 2002; Appl. No.: 09/294794; Filed: Apr. 19. 1999.
- US 6788220 B2. Multi-speed capacitive displacement encoder / Netzer Y.; Assignee: Netzer Motion Sensors Ltd.; Date of patent: Sep. 7, 2004; Appl. No.: 10/282890; Filed: Oct. 29. 2002.
- US 7126495 B2. Linear electric encoder with facing transmitter and receiver / Netzer Y.; Assignee: Sick Sensors Ltd.; Date of patent: Oct. 24, 2006; Appl. No.: 10/822094; Filed: Apr. 8. 2004.
- US 8567229 B2. Method for calibrating a rotational angle sensor / Netzer Y.; Assignee: Sick Sensors Ltd.; Date of patent: Oct. 29, 2013; Appl. No.: 12/907057; Filed: Oct. 19, 2010.
- netzerprecision.com
- www.bastion-karpenko.narod.ru
- militaryrussia.ru
- spinner-group.com
- Павлов С., Филиппов А. Антенные фазированные решетки. Обзор компонентной базы для реализации приемопередающих модулей // Компоненты и технологии. 2014. № 7.
- Ефремов В. Компонентная база для АФАР: высокочастотные соединители // Компоненты и технологии. 2014. № 9.
- Воробьев С. Выбор элементной базы для систем вторичного электропитания приемопередающих модулей АФАР // Компоненты и технологии. 2014. № 10.
 21 сентября, 2020
21 сентября, 2020