
 отправка...
отправка...Асинхронные конечные автоматы в импульсных источниках питания
Введение
С развитием цифровой микроэлектроники ее все чаще стали использовать в нетрадиционных областях. Так вытесняются аналоговые методы регулирования в импульсных источниках питания и устройствах зарядки аккумуляторов [3] цифровыми алгоритмами [2] и Smart-технологиями [1]. Многие из них относятся к технологиям Know-How.
Самыми серьезными недостатками импульсных источников питания остаются пульсация выходного напряжения и, как следствие, создаваемые ими относительно сильные радиопомехи приемным устройствам. Особенно это относится к мощным импульсным источникам питания.
С этими недостатками обычно борются, применяя на выходе источника питания фильтры с большими номиналами электролитических конденсаторов. Но это не самый радикальный способ. Есть способ лучше. Например, еще в микросхеме 142ЕП1 (СССР) был применен метод синхронизации частоты срабатываний встроенного порогового устройства (компаратора) с внешней частотой системного тактового генератора. Микросхема работала в режиме ШИМ и при этом оказывала на всю систему гораздо меньшее влияние радиопомехами по цепям питания, чем обычные импульсные источники питания с той же мощностью.
Похожий метод синхронизации до сих пор применяется для «вертикального управления» в тиристорных регуляторах переменного напряжения, имеющих в своем составе датчик перехода входного напряжения через ноль («нуль-орган»).
Зачем импульсному источнику питания нужен цифровой автомат?
Эту статью можно рассматривать как продолжение материала, посвященного математическим методам синтеза конечных цифровых автоматов, опубликованного автором в [2], но теперь на примере алгоритмов управления выходным силовым ключом импульсного источника питания.
Рассмотрим, с применением таблиц переходов и карт Карно-Вейча, два варианта синтеза логических управляющих автоматов (ЛУА) для понижающих импульсных источников питания. Их цели:
- тактирование сигнала встроенного компаратора внешним генератором с регулируемой частотой прямоугольных импульсов;
- безопасное регулирование и стабилизация в широком диапазоне формируемого выходного напряжения (или тока) изменением частоты внешнего тактового генератора.
Функциональная схема, показанная на рис. 1, совмещает в себе оба варианта и поясняет их работу. Она содержит привычные элементы для понижающих импульсных источников питания: транзисторный ключ, импульсный диод, дроссель и конденсатор фильтра. Дополнительно в выходной цепи установлен либо датчик (компаратор) выходного напряжения на нагрузке Rlod, измеряющий напряжение между контактом ComU и общим выводом, либо датчик (компаратор) тока в Rдат, измеряющий напряжение между выводами ComI и ComU.

Рис. 1. Функциональная схема
Аналогичные компараторы можно найти в составе адаптивного контроллера Intersil Ziler Labs ZL2008 [1].
Компаратор напряжения используется при формировании регулируемого стабильного выходного напряжения на нагрузке Rlod, например для питания электронной аппаратуры, а компаратор тока — для формирования выходного тока в Rlod, например для питания сервисных электродвигателей в следящих приводах.
Первый вариант ЛУА
В этом варианте реализуется так называемый частотно-импульсный метод модуляции (ЧИМ): каждый поступающий на вход схемы ЛУА синхросигнал (f = 1) запускает ключ, при условии, что компаратор к тому моменту еще не сработал (com = 0), то есть значение выходного напряжения (или тока) не достигло заданной величины срабатывания компаратора.
При простоте схемы высокая частота следования синхроимпульсов (f) может обеспечить достаточно хорошее качество выходного питания.
Рассмотрим полный процесс синтеза схемы ЛУА. На рис. 2 приведена таблица состояний и переходов, описывающая реакцию асинхронного последовательностного ЛУА на входные сигналы управления «f» и «com».

Рис. 2. Исходная таблица состояний и переходов ЛУА
Переходы (рис. 2) очевидны, но все-таки следует пояснить назначения некоторых из них:
- [1-2-1…] и [4-5-4…] защищают выход из-за нарушения последовательности или неисправности при формировании сигнала синхронизации — «зависании» на уровне «лог. 0» или «лог. 1».
- [1-3-6-3…] форсирует нарастание выходного напряжения (тока) на выходе до назначенного уровня срабатывания компаратора.
- [1-3-4-2-1…] и [1-3-6-2-1…] — установившиеся нормальные режимы работы.
Для процедуры сжатия таблицы построим карту финальных пар состояний (рис. 3).

Рис. 3. Карта финальных пар состояний (для автомата Мура)
Из этой карты следуют максимальные совместимые множества состояний MC{(1-2), (2-4-5), (3-6)}, причем состояние «2» альтернативно входит как в МС1(1-2), так и в МС2 (2-4-5). Особенность карты на рис. 2 заключается в том, что объединение состояний в МС возможно только по условиям автомата Мура, то есть:
N+(L,N), Y(N),
где L — состояние входа; N — текущее внутреннее состояние автомата; Y(N) — состояние выхода. Минимального покрытия (рис. 3) для автомата Мили не существует, вернее, в данном случае состояния совпадают. Теперь можно построить сжатую таблицу переходов и назначить кодирование МС-состояний (рис. 4).
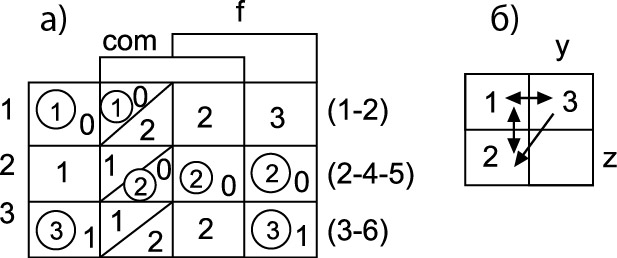
Рис. 4.
а) Сжатая таблица переходов для автомата Мура;
б) таблица кодирования МС-состояний
В сжатой таблице переходов во втором столбце (com & not(f)) через дробную черту в знаменателях показаны альтернативные переходы между подмножествами МС1(1-2), МС2(2-4-5) и МС(3-6). Будем далее использовать именно эти альтернативные переходы, так как в таблице кодирования они позволяют выполнить «не соседний» переход из состояния «2» в состояние «3» без критических последовательностных гонок (рис. 4, столбец [com & not(f)] таблицы переходов) и максимально упростить карты Карно-Вейча.
С учетом выбранного кодирования строим окончательную таблицу переходов (рис. 5).

Рис. 5. Окончательная таблица переходов
По рис. 5 строим карты Карно-Вейча (рис. 6) для кодирующих переменных (y, z) и выделяем минтермы, одновременно минимизируя обе карты. При этом выгодно выписать уравнение не для переменной y, а для ее инверсии:

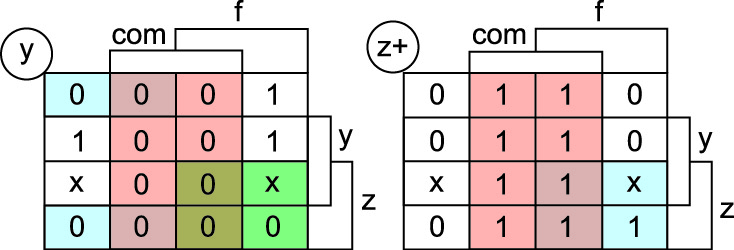
Рис. 6. Карты Карно-Вейча для кодирующих переменных z, y
Теперь можно изобразить электрическую схему ЛУА (рис. 7), реализующую эту систему уравнений на логических элементах, например 555ЛА3, 555ЛР11 (СССР) или их аналогах SN74LS00 и SN74LS51.

Рис. 7. Электрическая схема частотно-импульсного ЛУА
Второй вариант ЛУА
Этот вариант отличается от первого тем, что реализует ШИМ — широтно-импульсную (а не ЧИМ — частотно-импульсную) модуляцию. Особенность схемы еще и в том, что длительность «лог. 1» ШИМ никогда не превышает длительность «лог. 1» синхронизирующего сигнала любой частоты. Поэтому, изменяя скважность синхросигнала, можно ограничивать максимально возможное напряжение, развиваемое на выходе источника питания. В остальном поведение схемы похоже на поведение схемы в первом варианте.
На рис. 8 приведена таблица состояний и переходов, описывающая реакцию асинхронного последовательностного ЛУА на входные сигналы управления f и com.

Рис. 8. Исходная таблица состояний и переходов ЛУА
Переходы (рис. 8) очевидны, но все-таки следует пояснить некоторые из них:
- [1-3-4-5-4…] и [1-2-1…] отключают выход источника при «зависании» сигнала синхронизации на уровне «1» или «0».
- [1-3-1…] штатно формирует период ШИМ.
- [1-3-4-2-1…] и [1-3-4-5-1…] — последовательность состояний при установившихся нормальных режимах работы.
Для сжатия таблицы (рис. 8) построим карту финальных пар состояний (рис. 9).

Рис. 9. Карта финальных пар состояний (по Мили)
Из этой карты по условиям Мили, то есть N+(L,N) и Y(L,N), следуют максимальные совместимые множества состояний MC{(1-2-3), (2-4-5)}, причем состояние «2» альтернативно входит как в МС1 (1-2-3), так и в МС2 (2-4-5). Теперь можно построить сжатую таблицу переходов и назначить кодирование МС-состояний (рис. 10).

Рис. 10.
а) Сжатая таблица переходов для автомата Мили;
б) таблица кодирования МС-состояний
Здесь в столбце таблицы (com & not(f)) через дробную черту (в знаменателях) показаны альтернативные переходы между МС1 (1-2-3) и МС2 (2-4-5). Далее будем использовать переходы, указанные в знаменателях. Именно они позволяют максимально упростить карты Карно-Вейча.

Рис. 11. Сжатая таблица переходов состояний
По рис. 11 строим карты Карно-Вейча (рис. 12) для кодирующей переменной (z) и выходной переменной (y). Выделяем минтермы, одновременно минимизируя обе таблицы. Для этого выгодно выписать не переменную y, а ее инверсию:

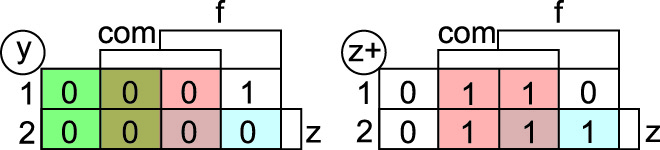
Рис. 12. Карты Карно-Вейча
Теперь по картам Карно-Вейча (рис. 12) можно изобразить электрическую схему ЛУА (рис. 13), реализующую эту систему уравнений на логических элементах.

Рис. 13. Электрическая схема ЛУА, например на логическом элементе 555ЛА3 (СССР) или его аналоге SN74LS00
Следует обратить внимание на то, что на входе схемы используется инверсный сигнал компаратора NOT(COM), а на выходе формируется инверсный сигнал NOT(Y).
Заключение
Тема совершенствования схем импульсных источников питания не только не закрыта, а наоборот, становится все более актуальной с повышением полезной мощности источников питания и расширением возможностей технологий микроэлектроники и цифровых методов управления. Однако многие фирмы-разработчики относят все сведения к области Know-How.
- Лукашевич Д. Цифровое управление питанием приходит на смену аналоговому // Электронные компоненты. 2011. № 6.
- Сафронов В. Практика математического синтеза микропрограммных управляющих автоматов на основе ПЗУ и ПЛМ // Компоненты и технологии. 2014. № 1.
- Охрименко В. Интеллектуальные контроллеры зарядки аккумуляторов // Электронные компоненты. 2011. № 6.